
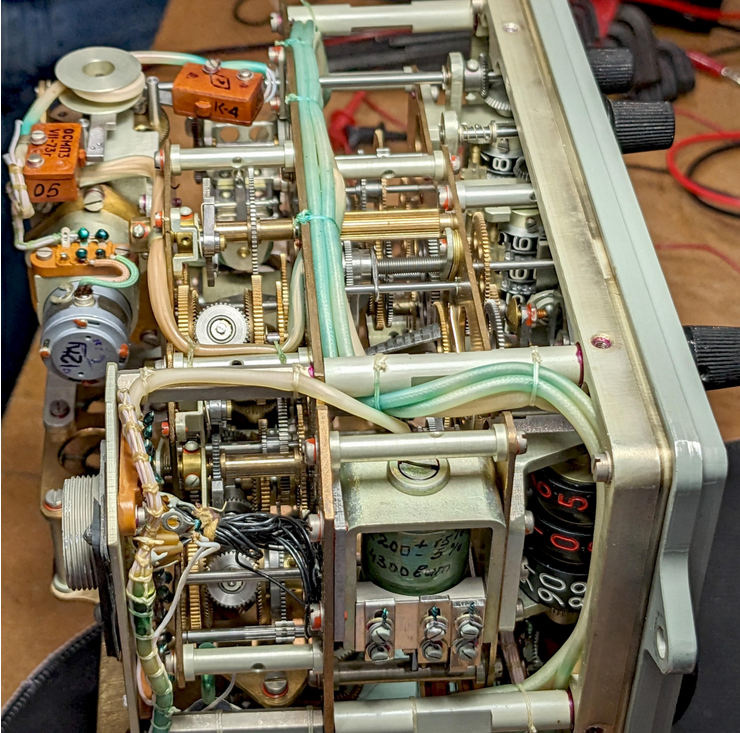
Советская космическая программа иногда удивляла изобретательностью своих решений. Например, одним из навигационных приборов на космическом корабле "Союз" был "Глобус". Он был назван так потому, что для определения положения космического корабля на Земле используется вращающийся глобус.Это навигационное устройство представляет собой электромеханический аналоговый компьютер, в котором реализована сложная система шестеренок, кулачков и дифференциалов для расчета положения космического корабля. Он также содержит различные электрические компоненты, такие как реле и соленоиды.
Официально он называется "космическим навигационным устройством" и сокращенно "ИНК", но для ясности мы предлагаем использовать более привычное название "Глобус". Удивительно, но его также можно приобрести!
"Интегрированный глобус вращается вокруг двух осей и имеет неподвижный индикатор на пластиковом куполе, показывающий, где сейчас находится космический аппарат. На передней панели рядом с глобусом находится панель отображения координат, показывающая широту и долготу.
Они определяются очень сложной функцией, которая возникает при проецировании орбиты на глобус. Функции широты и долготы выполняются металлической камерой. На изображении ниже показан механизм определения долготы. Каждая функция имеет две камеры, причем одна камера выполняет нужную функцию, а другая - "противоположную".
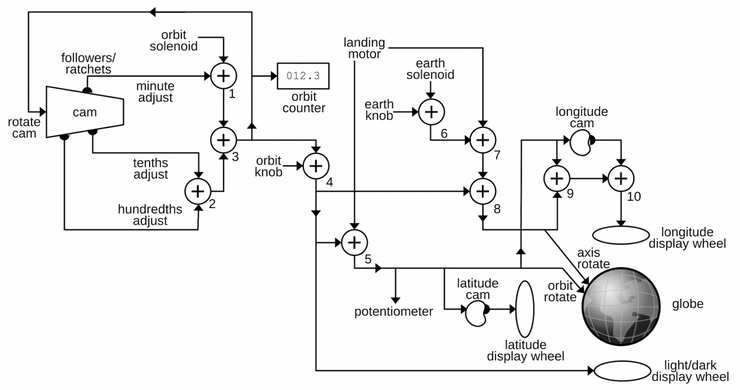
А переключатель свет/тень внизу показывает, будет ли космический корабль находиться в солнечном свете или в тени, что является важной информацией во время стыковки.На схеме ниже показано, как это работает". Сфера" - это пропорциональный компьютер, который выражает числовые значения путем поворота оси на определенную величину.
Это вращение управляет глобусом и циферблатом дисплея. Поток сигналов этого вращения показан линиями на диаграмме. Расчет основан на сложениях, производимых десятью дифференциальными шестернями. На диаграмме каждый символ '' обозначает одну из дифференциальных передач.
Остальные шестерни соединяют компоненты, масштабируя сигналы с помощью различных передаточных чисел. Сложные операции достигаются за счет использования трех специально разработанных распределительных валов.
У глобуса есть и вторая функция - он показывает, где приземлится космический корабль, если для начала посадки будет включен тормозной двигатель. При нажатии кнопки глобус в перчатке вращается до тех пор, пока точка посадки не окажется ниже целевой точки, что позволяет астронавтам определить пригодность точки для посадки.Для этого астронавты настраивают глобус, регулируя начальное положение и период вращения космического корабля. Затем перчатка может отслеживать орбиту электромеханическим способом.
В отличие от компьютера наведения на американском корабле "Аполлон", глобус не получает навигационную информацию от инерциального измерительного блока (IMU) или других источников, поэтому он не знает фактического положения космического корабля. Все, что он может сделать, это отобразить его прогнозируемое положение.
Особенности шара
Глядя на глобус, вы можете задаться вопросом. Как вращается эта копия глобуса? Да, мы помним, что этот глобус вращается вокруг двух осей. Но как насчет другой оси? Дело в том, что глобус не "плавает" свободно, а прикреплен к прибору хитрым образом. Экватор глобуса представляет собой цельный металлический блок, который вращается на горизонтальной оси.
Внутри него также находится второй механизм, который вращает Землю по оси север-юг. Эти два вращения контролируются концентрическими осями, прикрепленными к устройству, которые позволяют глобусу вращаться в обоих направлениях, оставаясь левым и правым.На рисунке ниже показана рама, которая удерживает и управляет глобусом.
Точечная ось установлена на устройстве горизонтально, а вращение осуществляется с помощью двух шестеренок с левой стороны: одна шестеренка вращает глобус и раму вокруг точечной оси, а другая вращает глобус вокруг вертикальной полярной оси (неподвижного экватора).
Угол на изображении выше составляет 51,8°. Это потому, что угол представляет собой наклон типичной орбиты корабля "Союз". Поэтому, если вращать Землю вокруг пунктирной линии, цель будет двигаться по стандартной орбите. С другой стороны, если вращать полюса Земли, то при вращении Земли орбита будет находиться на расстоянии 51,8° от поверхности Земли.
Почему 51,8°? Место запуска "Союза", космодром Байконур, расположено под 45,97° северной широты, поэтому 45,97° - наиболее эффективный угол наклона. Однако, чтобы ракета не прошла над западным Китаем (где она может случайно столкнуться), ее пришлось наклонить к северу, в результате чего угол наклона составил 51,8°.
Особенностью этой конструкции является то, что наклон траектории определяется углом наклона перчаточного механизма. Для разных орбит необходимо создавать разные механизмы перчаток. Кроме того, данное устройство может использоваться только для круговых орбит, что делает его непригодным при смене орбит. Например, при швартовке. По этой причине некоторые астронавты даже просили убрать перчатки с панели управления. Однако они не были убраны до установки компьютерного экрана на космическом корабле "Союз ТМА" в 2002 году.
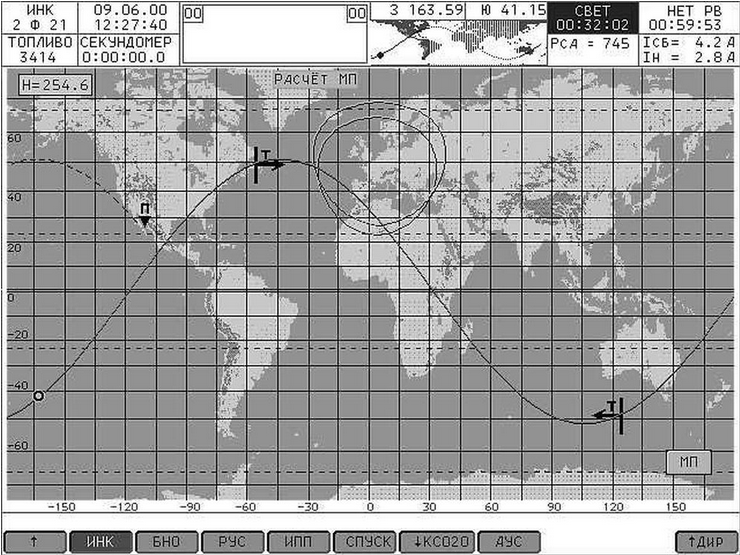
Это экран компьютера системы формирования изображений Neptune ME на космическом корабле "Союз ТМА", который заменил "Глобус". Консоль "Союза" намного проще консолей "Аполлона" и "Спейс Шаттла" и основана на совершенно других принципах.
Кстати, сам "Глобус" небольшой и не показывает много деталей. Он показывает топографию гор, озер и рек. На основе этих данных астронавты могут сравнивать свое положение с географическими объектами, видимыми на Земле. На карте нет политических границ, за исключением толстых красных и фиолетовых линий. Эти линии обозначают границы Советского Союза и границы коммунистических и некоммунистических стран, что важно для определения места посадки. На глобусе также есть восемь пронумерованных кружков, которые обозначают радиостанции для связи с космическими кораблями и наземные станции, с которыми могут связаться космонавты.
Кроме того, вы заметили символы на английском языке? На глобусе можно увидеть GDS (Голдстоун), MIL (Мерритт-Айленд), BDA (Бермуды) и NFL (Ньюфаундленд) - это станции НАСА. Глобус был создан для программы испытаний "Аполлон-Союз" - стыковки космического корабля "Аполлон" с капсулой "Союз" в 1975 году.
Дифференциальный механизм
Для увеличения или уменьшения скорости в роще используется несколько дифференциальных передач. На рисунке ниже показаны два набора дифференциальных шестерен рядом друг с другом.Но как из фиксированного входного сигнала можно создать три цикла переменной скорости? Решением является специальный конический распределительный вал со спиральным сечением. Три заглушки движутся по кулачку, и когда кулачок вращается, заглушки выталкиваются наружу и вращаются вокруг своей оси. Если пробки расположены близко к узкой части кулачка, они будут перемещаться на небольшое расстояние и слегка вращаться. Однако, если пробка находится близко к более широкой части кулачка, она будет перемещаться на большее расстояние и вращаться сильнее. Таким образом, перемещая пробку в определенное положение на кулачке, можно выбирать скорость вращения пробки.
Механизм управления скоростью вращения показан ниже. У конуса три последователя, но только два видны под этим углом. Шестерня "передачи" перемещается вперед-назад с помощью внешней ручки, чтобы выбрать, каким плунжером управлять с помощью внутренней ручки.Конечно, кулачок не может вращаться бесконечно в спиральной конфигурации. Поэтому после одного оборота поперечное сечение кулачка быстро уменьшается, возвращаясь к исходному диаметру, и кулачок возвращается в исходное положение. Ведомый диск соединен с дифференциалом через проскальзывающую муфту и храповик, и когда ведомый элемент блокируется, храповик заставляет приводной вал остановиться. Затем приводной вал продолжает вращаться, и следящий механизм снова начинает вращаться. Это создает относительно плавное вращение, при этом скорость меняется в зависимости от положения следящего элемента.
Шестерни установлены на горизонтальной оси, называемой карданным валом. С правой стороны установлена зубчатая передача. Все они вращаются с одинаковой скоростью.
С каждой стороны имеется по две шестерни (отмечены желтым цветом). Шестерни осевого дифференциала - это конические шестерни, их зубья расположены под углом для зацепления с центральным дифференциалом. Каждая шестерня межосевого дифференциала входит в зацепление с зубчатой шестерней и свободно вращается на горизонтальной оси ВОМ. Всего имеется три цилиндрические шестерни, две из которых соединены с шестернями межосевого дифференциала, а одна - с карданным валом.
